-Pileder system of sound extension for X68000-
最終更新:2025/2/15
2025/2/15 Version1.03をリリースしました
2025/2/15 mt32-pi改造版をおまけとして公開しました
RaspberryPi Picoをオーバークロックして使用する場合があります。
定格を超えた動作のため使用は自己責任です。
Version1.03
- MIDIパイルダーのパケットロス修正
送信ディスエーブル時に書き込まれたMIDIデータが送信されない不具合の改修- 開発環境の更新
VSCodeのPICO用プラグインに変更
PGCC13.3.1およびPico SDKを2.0.0を使用- Pico2用モジュールの提供
MIDI,PCM,FM音源の各パイルダー用のモジュールを提供
PilederXは簡潔にいえばサウンド機能に特化したX68000用の拡張ボードです。
MIDIボード(CZ-6BM1/A)及びまーきゅりーゆにっとV4(MKMU-1O)の複合ボードとして動作します。 加えてMT32-PI(RaspberryPI Zero2Wもしくは3A+)をボード上に実装できます。 CZ-6BM1/A,MKMU-1Oの一部機能についてはサポートしていませんが実用上問題にならないでしょう。
サウンド出力はMIDI(MT32-PI)、まーきゅりーゆにっとV4のPCM及びFM音源の3系統を個別に出力できます。 この3系統の出力に加えて外部入力1系統(合計4系統)をミキシングすることも可能です。 このミキサー機能にはヘッドフォンアンプ機能もありますのでミュージックBOXのように使えます。
PRO/ACE/EXPERT/XVI/XVI Compact/X68030で動作を確認していますが、 全てのX68000シリーズで使用することが可能と思われます。 またいくつかのアクセラレータ(PhantomX含む)やXVI Compactのオーバークロックモデルである REDZONEの24MHzでも動作を確認しています。
MKMU-1OのPCMに関してはPCM8PP等のドライバの負荷が高いため高性能な機種が必要となります。 事実上、X68030(040turbo,060turbo含む)や拙作のPhantomXが必要でしょう。REDZONEの24MHz でもPCM8PPは厳しい場合があります。
PilederXの名前の由来はマジンガーZのホバーパイルダーです。 マジンガーZの本体にホバーパイルダーが合体(パイルダーオン!)する様に憧れて ベースボードに様々な機能のモジュールを合体させて機能強化するコンセプトです。 それにあやかり合体させるモジュールの事を"パイルダー"と呼んでいます。 ロゴも兜甲児のヘルメット姿をイメージしています。
因みにPilderXではありませんPilederXです(ここテストに出ます)。
"まーきゅりーゆにっと"が正しい表記らしいです(商標の関係とか)。
同人ハードウェアである"まーきゅりーゆにっと"を満開製作所が機能拡張(V4)して販売していた拡張ボードです。
型名はMK-MU1とMK-MU1Oの二つがあります。
MK-MU1はPCMのみ(FM音源無し)。
MK-MU1OはPCMに加えてFM音源(YMF288×2)を実装(最後のOはOPNのO何でしょうか?)。以下、文中に型番が出てきますので補足しておきました。
"まーきゅりーゆにっと"は文章として読みにくいので以下"Mercury-Unit"もしくは型名で表記します。
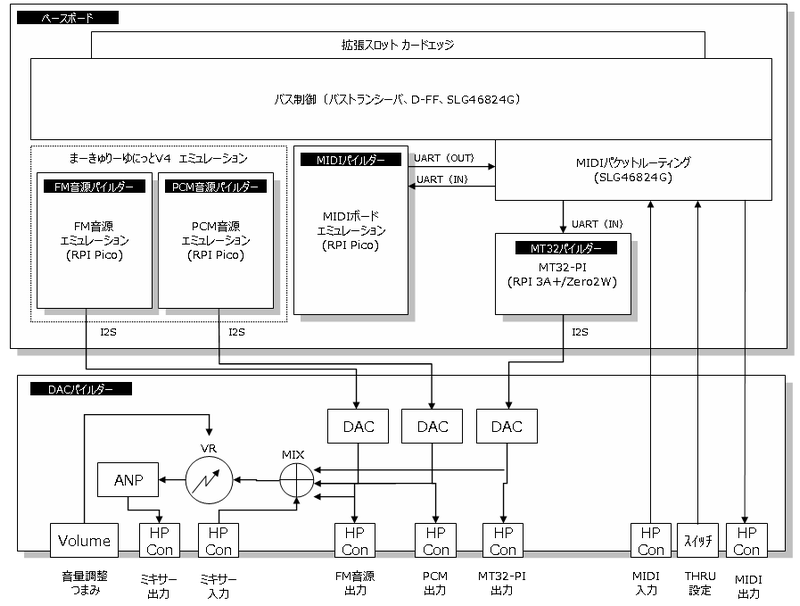
全体の概要を説明するために機能ブロック図を示します。 影付きのブロックは何らかの基板が存在することを表しています。
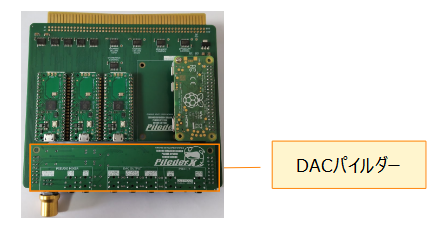
ベースボードに各モジュール(以下パイルダーと呼ぶ)を実装する構造です。 また音声出力に関する全ての機能はDACパイルダーに集約しています。
MIDIパイルダー、PCM音源パイルダー、FM音源パイルダーはRaspberryPi Picoを採用しました。 MT32-PIは基板レイアウトの制約上RaspberryPi 3A+もしくはZero2Wが実装されます。
DACパイルダーにはMIDI関係のコネクタ、各音源の音声出力、アンプ機能を備えたミキサーが 実装されています。
PilederXの設計思想は "使い勝手の良さ" に拘るです。
ボードのみでサウンド機能を網羅的に強化しながらも外部MIDI音源、ミキサー、アンプを必要としない環境が構築できます。 ヘッドフォンさえあれば面倒な配線や外部機器の無いスマートさが特徴です。
もちろん拘る人は外部にミキサーやアンプ、良質なスピーカー等を用意して楽しむのも可能です。
もう一歩進んでオリジナルのDACパイルダーを開発してみてはどうでしょうか。 良いものが出来たらを同人ハードとして頒布してもかまいませんよ。
ベースボード
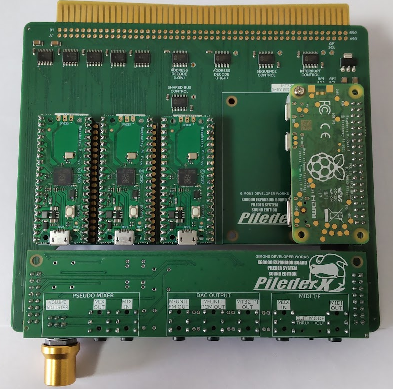
PilederXのハードウェアで中心となるベースボードです(ベースボード単体では機能しません)。 各実装エリアに各パイルダーを取り付けて使用します(下の画像は全パイルダーを実装した状態)。
ベースボードにはバス信号変換用のレベコンやD-FFとバス制御用のGreenPAK(SLG46824G)で構成されています。 GreenPAKには専用ファームウェアが書き込まれておりアドレスデコーダや多くのバス制御機能を提供します。 ファームウェアは製造時に書き込みますのでユーザー側での作業は必要ありません。

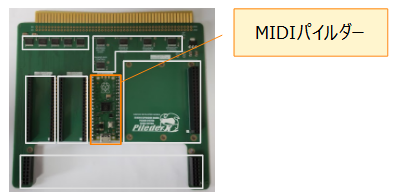
MIDIパイルダー(CZ-6BM1/Aエミュレーション)
RaspberryPi Pico及びそのピン互換ボードです。 MIDIパイルダー実装エリアに取り付けて使用します。 別途MIDIボードをエミュレーションするためのファームウェアを書き込む必要があります。 MIDI OUT及びMIDI IN信号はDACパイルダーのMIDI OUT/INコネクタに接続されています。 また内部的にMT32-PIのMIDI IN(GPIO)に接続されています。
純正MIDIボード(CZ-6BM1/A)との違いはID(0固定)及びIRQのレベル(4固定)は変更できないことと、 MIDI OUTが1系統かつTAPE IN及びOUTをサポートしていないことです。
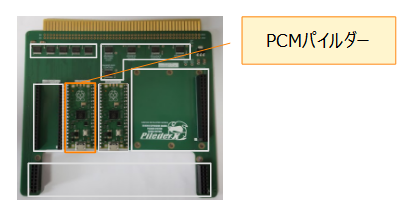
PCMパイルダー(MK-MU1O PCMエミュレーション)
RaspberryPi Pico及びそのピン互換ボードです。 PCMパイルダー実装エリアに取り付けて使用します。 別途Mercury-Unit V4のPCMをエミュレーションするためのファームウェアを書き込む必要があります。 PCM出力信号はDACパイルダーの接続コネクタに出力されます。 出力信号はI2Sでありアナログ信号への変換はDACパイルダー上で行います。
MK-MU1Oとの違いはPCM入力および光デジタル入出力をサポートしていないことです。
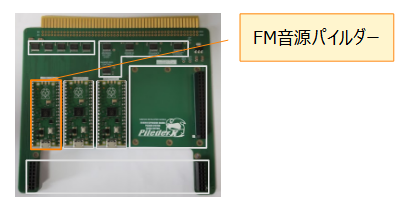
FM音源パイルダー(MK-MU1O YMF288エミュレーション)
RaspberryPi Pico及びそのピン互換ボードです。 FM音源パイルダー実装エリアに取り付けて使用します。 別途Mercury-Unit V4のFM音源をエミュレーションするためのファームウェアを書き込む必要があります。 FM音源出力信号はDACパイルダーの接続コネクタに出力されます。 出力信号はI2Sでありアナログ信号への変換はDACパイルダー上で行います。
FM音源パイルダーを使用するにはPCMパイルダーの実装が必要です。 Mercury-Unit V4(MK-MU1O)の構成上PCMが主体でYMF288はオプションという制御になります。 なおIRQのレベル(4固定)も変更できません。
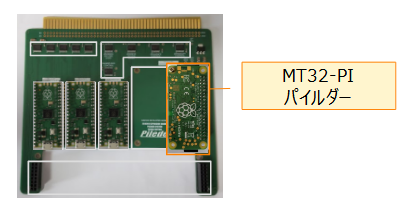
MT32-PIパイルダー(MT32エミュレーション)
RaspberryPi Zero2W及び3A+が使用可能です。 MT32-PIパイルダー実装エリアに取り付けて使用します。 別途MT32-PIのファームウェア書き込みとセットアップが必要です。 MT32の出力信号はDACパイルダーの接続コネクタに出力されます。 出力信号はI2Sでありアナログ信号への変換はDACパイルダー上で行います。
RaspberryPi 2B,Zero,3B,3B+,4B等は使用できません。
消費電力を抑えるためにZero2Wを推奨します。
DACパイルダー(サウンド出力モジュール)
PilederX用に設計したサウンド出力のための複合ボードです。 DACパイルダー実装エリアに取り付けて使用します。 DACパイルダーの接続コネクタには各パイルダーのI2S信号や MIDIパイルダーのMIDI IN/OUT、MT32-PIの制御GPIO等が接続されています。
接続コネクタの仕様は公開しますのでDACパイルダーはユーザー自身でオリジナルを設計することが可能です。
標準では以下の機能をサポートします。
- MIDIボード向けIN/OUT端子(TRS タイプAコネクタ仕様、THRUスイッチサポート)
- MT32-PI PCM出力(PCM5102A)
- Mercury-Unit V4 PCM出力(PCM5102A)
- Mercury-Unit V4 FM音源出力(PCM5102A)
- MT32-PI PCM出力、Mercury-Unit V4 PCM,FM音源出力、外部入力の4入力ミキサー機能
- ボリューム調整可能なヘッドフォンアンプ機能(マスターボリュームのみ)
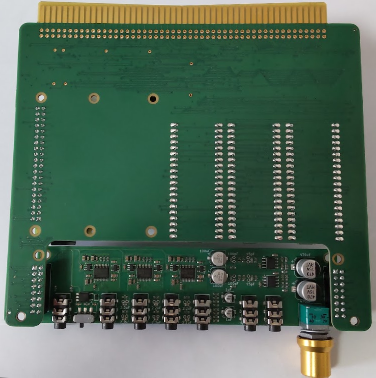
美意識的に裏側にICやコネクタ等を実装することでスッキリとした見た目に仕上げました。
アナログ回路設計初心者の私が設計した基板ですから音質等に過度な期待は禁じます!
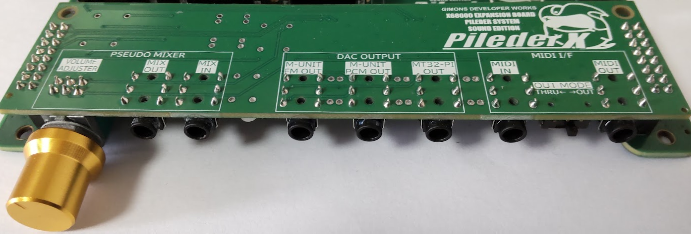
MIDI IN/OUT端子についての補足。TRSコネクタ(所謂ステレオヘッドフォンと同じもの)を使用しています。 一般的なDINでもなく純正MIDIボード(CZ-6BM1/A)のようなMiniDINでもありません。 注意しなければならないのはTRS MIDIの規格(配線の仕方)にはTypeAとTypeBという物があって コネクタのTip,Ring,Sleeve(頭文字でTRSです)への配線が異なります。 PilederXでは"TypeA"を採用しています。
TRS MIDIの変換ケーブルを調達する場合は"TypeA"であることを確認してください。 "TRS MIDI 変換"で検索すればすぐに見つかると思います。
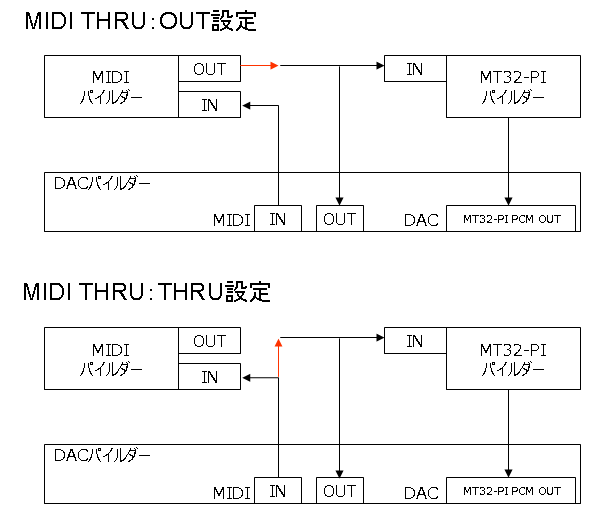
MIDI THRUスイッチ(OUT MODE)についての補足。THRUスイッチを"OUT"側に設定した場合はMIDIパイルダーからの MIDI出力はDACパイルダーのMIDI OUTとMT32-PIのMIDI INに接続されます。 つまり外部にMIDI機器を繋げて演奏したりMT32-PIを利用して演奏できる状態です。
THRUスイッチを"THRU"に設定した場合はMIDIパイルダーのMIDI出力は切断され、 DACパイルダーのMIDI IN信号はOUTに転送されます。 合わせてMIDI IN信号はMT32-PIのMIDI INに接続されます。
MT32-PIをX68000の外部から利用できるようになります。
MIDIボード(CZ-6BM1/A)エミュレーション
XM6 TypeGのMIDIボードエミュレーションをモディファイしてPico及びPico2向けのファームウェアを開発しました。 TAPE OUT/INを除くすべての機能をエミュレーション可能です。
Mercury-Unit V4(MK-MU1O) PCMエミュレーション
XM6 TypeGのMK-MU1OボードエミュレーションのPCM機能をモディファイしてPico及びPico2向けのファームウェアを開発しました。 PCM入力および768ドット×512ドット 256色モードはサポートしていません。
使い勝手向上のため一部仕様を変更しています。
MK-MU1Oの標準仕様ではリセット後にDMAC向けのPCLやREQ信号を出力しません。 PCMを使用していない時にDMACに不必要な信号出力を抑制することが目的となっています。 PCLやREQ信号を出力するためには製品に付属するReqEn.xコマンドが必要でした。
一方、Mercury-Unit V3までは常にPCLやREQ信号を出力します。 V3当時に開発されたであろうPCM8PP等のドライバはまずPCLやREQ信号が出力されている ことを前提に初期化を行うためReqEn.xを実行していないV4ではドライバの常駐に失敗します。
MK-MU1Oを所有していなかった方がこの仕様を知らないといきなりハマル訳です。 実際XM6 TypeGにMK-MU1Oエミュレーションを実装した時に同様の問い合わせがきました。 この経験を元にトラブルを未然に防ぐように仕様を変えます。
まずリセット直後はMK-MU1Oと同様にPCLやREQ信号を出さない状態にして待機し、 ドライバ常駐等により初めてI/Oポートにアクセスした段階で強制的にPCLとREQ信号の出力を有効にします。
電源オンもしくはリセット直後は無駄なPCLやREQ信号を出さない仕様を踏襲しながらも、 面倒なReqEn.xの実行は必要ありません。
Mercury-Unit V4(MK-MU1O) FM音源エミュレーション
XM6 TypeGのMK-MU1OボードエミュレーションのFM音源機能をモディファイしてPico及びPico2向けのファームウェアを開発しました。 FM音源エンジンにはYMFMを使用しています。 FMGENは再現度に難はあるものの非常に軽量でPicoでも動作するのですがライセンス的に利用しずらいため採用を見送りました。
YMFMはFMGENに比べて再現度は非常に高いのですが負荷が高くてPicoに使用されたRP2040では動作させることはできません。そこでYMFMの処理を解析してコードを再構築することで大幅に軽量化させて動作可能にしています。 その中で再現性が低下している等の問題が発生している可能性は否めません。 さらにMK-MU1OはYMF288を2個実装しているのでエミュレーションも2個分必要です。 どう足掻いてもRP2040の定格である125MHz(最大133MHz)では処理が間に合わないため オーバークロック動作させました。
定格を超えた設定で使用した場合メーカーの保証等は受けられなくなります。 使用は自己責任ですのでオーバークロックが許容できない場合はFM音源パイルダーを実装しないでください。 現時点で220MHzまでオーバークロックしています(ファーム内で指定していますのでユーザーに作業は必要ありません)。
Version1.03からPico2用のモジュールも提供しています。Pico2に採用されたRP2350は性能が大幅に改善されており、 RP2040を採用したPicoに比べ概ね2倍の性能を持っています。したがってPicoに比べて若干の余裕があります。 しかしながらYMF288×2の全チャネルを駆動させるには少々厳しいためPico同様220MHzまでオーバークロックしています。
YMF288のリズム音源データについての補足。
YMF288にはリズム音源を持っておりIC内のROMにリズムデータ(ADPCM形式)が書き込まれています。 YMFMの前身であるMAMEのソースコード(かなり昔)にはこのADPCMデータがそのまま記述されていましたが、 ここ数年のMAME及びYMFMからはコードが削除されており外部のROMファイルをロードする方式に変更されました。
Pico及びPico2は外部にフラッシュメモリを持っていますが所謂ファイルシステムではありませんので、 ユーザーがこのROMファイルを用意できたとしても配置する術はありません。 そこでYMF288のテストレジスタにROMファイルのデータを書き込むとフラッシュメモリに保存する機能を実装しました。
リズムデータを書き込むコマンドを別途提供しますのでROMファイルを用意できる場合にはリズム音源が使用できるようになります。
導入準備(ハードウェア)
パイルダーユニットの実装
ベースボードにはMIDIパイルダー、PCMパイルダー(MK-MU1OのPCM部)、FMパイルダー(MK-MU1OのYMF288部)、 MT32-PIパイルダー(MT32-PI)、DACパイルダー(サウンド出力)の各実装領域(コネクタ)がありますのでそこに接続してください。 但しMIDIパイルダー、PCMパイルダー、FMパイルダーのファームウェアを書き込む為にはMT32-PIパイルダーとDACパイルダーを 取り外して行う必要があります。
制約事項としては以下の通りです。
- DACパイルダーは必須となります
- MT32-PIパイルダーを使用するためにはMIDIパイルダーが必須となります
- FMパイルダーを使用するためにはPCMパイルダーが必須となります
最小構成はMIDIパイルダーとDACパイルダーとなります(MIDIボード相当の機能)。 この構成にMT32-PIパイルダーを追加実装すると本体のみでMT32の音源が使用できます。
Mercury-Unit V4(MK-MU1O)を使用する場合はPCMパイルダーを実装してください。 PCMパイルダーのみ実装した場合はMK-MU1(FM音源なし)となります。 この構成にFM音源パイルダーを実装することでMK-MU1O相当となります。
MIDIパイルダー及びMT32-PIパイルダーを実装せずにPCMパイルダーのみ実装することも可能です。 この場合はMercury-Unit V4のMK-MU1相当となります。 追加でFM音源パイルダーを実装すればMK-MU1O相当です。 PilederXを単にMercury-Unit V4(MK-MU1またはMK-MU1O相当)として使用することも可能ということです。
導入準備(ファームウェア)
ライセンス
PilederXはベースボードとDACパイルダーに加えてRaspberry Pi Pico上で動作する ファームウェアの総称あるためファームウェア単体でご利用頂くことはできません。
HP上等で案内する公式頒布サイト(ショップ等)で正規に購入していただいた方に限り ファームウェアの使用が許諾されます。
なお公式頒布サイトでは譲渡やオークション等での転売禁止を購入条件としています。 譲渡やオークション等での転売で入手された方にはファームウェアの使用は許諾されません。
同人ハード及びファームウェアという特性上あくまであるがまま"AS IS"で頒布します。 従って使用者が受けたあらゆる損害に対して一切責任を持ちません。 またファームウェアに不備もしくは不具合があったとしてもそれを修正する責任もありません。 PilederXを利用することでRaspberry Pi PicoやX68000が故障するリスクがあります。 あくまで自己責任でチャレンジしてください。 この条件に納得できない場合はご使用をお控えください。
またファームウェアに関してはこのHP以外での配布を認めておりません。
RaspberyPi Picoへのファームウェア導入
Windowsを利用したファームウェア導入について説明します(Macは分かりません)。
MIDIパイルダー、PCMパイルダー、FM音源パイルダー全てで同じ手順となります。
MT32-PIとDACパイルダーを外して下さい(DACパイルダーは右上、左上のM3ネジを外して下さい)。

各パイルダーのBOOTSELボタン(白いプッシュボタン)を押下しながらUSBケーブルを接続してください。
当然ながらUSBのもう片方の端子はWindows機にUSB接続されています。


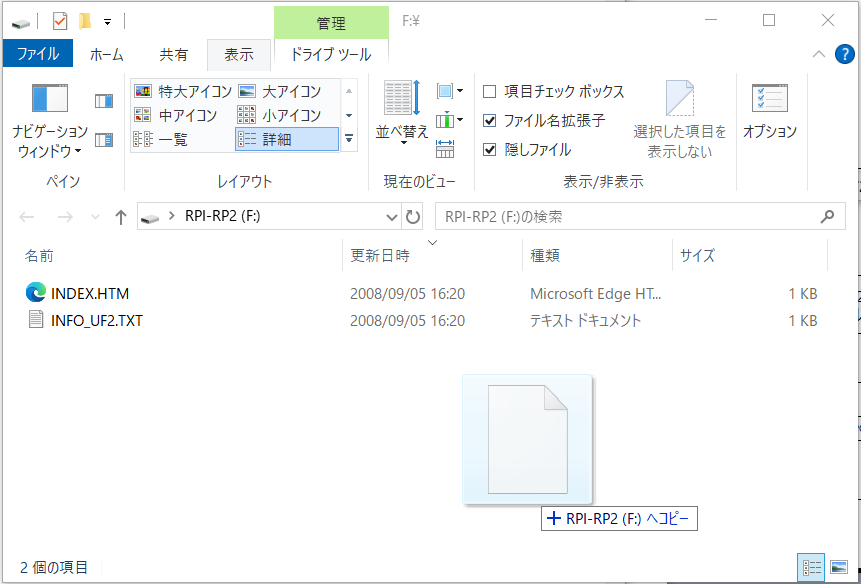
Windowsに認識されると次のような画面が表示されます。
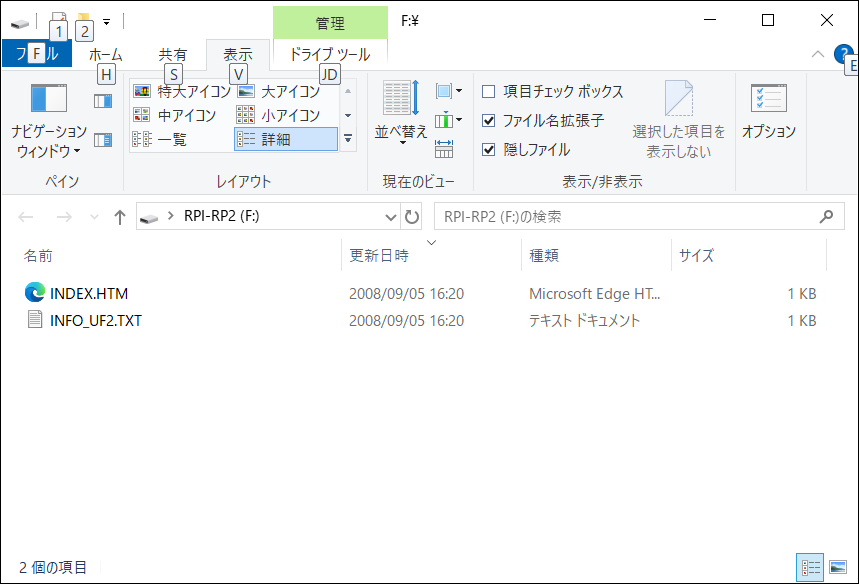
このウィンドウにファームウェア(拡張子uf2のファイル)をドラッグ&ドロップすれば書き込まれます。
Version1.03よりPico及びPico2のフォルダ名でファームウェアを分けて格納しています。 PicoにPico2用のファームウェアを書き込むことはできません(Pico2にPico用を書き込むこともできません)。
ファームウェア書き込みが完了すればアンマウントされウィンドウは勝手に閉じます。
ダウンロード(ファームウェア)
現時点でベースボード上のGreenPAKのファームウェアは提供しておりません。 ここで提供するのは各パイルダーのファームウェアとなります。 頒布する基板にはその時点での最新版が書き込まれています。
Version1.03pilederx version1.03のダウンロードzipファイルには以下のファイルが含まれています。
- pico/・・・Pico専用
midi.uf2・・・MIDIパイルダーファームウェア
pcm.uf2・・・PCMパイルダーファームゥエア
ymfm_fm.uf2・・・FM音源パイルダーファームウェア
- pico2/・・・Pico2専用
midi.uf2・・・MIDIパイルダーファームウェア
pcm.uf2・・・PCMパイルダーファームゥエア
ymfm_fm.uf2・・・FM音源パイルダーファームウェア
- x68k/・・・X68000用ユーティリティ
PLXRHYLD.x・・・FM音源パイルダー用リズムROMロードコマンドダウンロード(mt32-pi改造版)
これは完全なるおまけなのですがPilederXに実装できるmt32-piを少々改造しましたので、 提供します。改修内容はアーカイブの中のReadme.txtをご覧ください。
改造版(20250215)mt32-pi改造版のダウンロードmt32-piはGPL v3ですのでこのアーカイブもGPL v3となりPilederXのライセンス制約は 受けませんのでご自由にご利用ください。当然ながらソース公開が必要なため、 アーカイブにはパッチファイルを含めています。
セットアップ(事前準備)
MT32-PIを使用する場合とFM音源パイルダーのリズムROMを使用する場合のみ作業が必要です。
1.RaspberryPi Picoの装着
ヘッダー付きのRaspberryPi Pico(もしくはピン互換品)を3つ用意して、 MIDIパイルダー、PCMパイルダー、FM音源パイルダーの各ソケットに装着してください。 装着の際にはUSBコネクタがDACパイルダー方向になるように向きに注意が必要です。
頒布する基板にはRaspberryPi Picoを3つ実装済みですので作業は必要ありません。
2.ファームウェア書き込み
先に説明したファームウェア更新手順に従ってMIDIパイルダー,PCMパイルダー, FM音源パイルダーにファームウェアを書き込んでください。
頒布する基板の各パイルダーにはファームウェアを書き込み済みですので作業は必要ありません。
3.MT32-PIのRaspberyPiを装着(MT32-PIを利用する場合のみ)
RaspberryPi 3A+もしくはZero2wが使用できます。 MT32-PI自体のセットアップは事前に完了させておいてください。
頒布する基板にMT32-PI用のRaspberryPiは含まれておりません(ご自身でご用意下さい)。
"mt32-pi.cfg"が設定ファイルです。output_deviceをi2sに変更します。
# ----------------------------------------------------------------------------- # Audio options # ----------------------------------------------------------------------------- [audio] # Select audio output device. # # Values: pwm*, i2s # # pwm: Use the headphone jack # hdmi: Use the HDMI port # i2s: Use an I2S DAC output_device = i2sその他usbをoffにしたりgainを調整する等お好みに応じて設定してください。
MT32のROMのセットアップ等に関しては説明しません(質問もしないでください)。
セットアップ(本体への装着)
PilederXを取り空けるスロットは拡張スロット2(本体中央側)を推奨します。 部品実装が高さギリギリのためほとんどマージンが無いからです。また拡張スロット1に 他の拡張ボードを装着する場合には基板の部品(はんだ付けの脚も含む)が接触していない ことを確認してください。安心安全のため次の絶縁処理も参考にしてください。

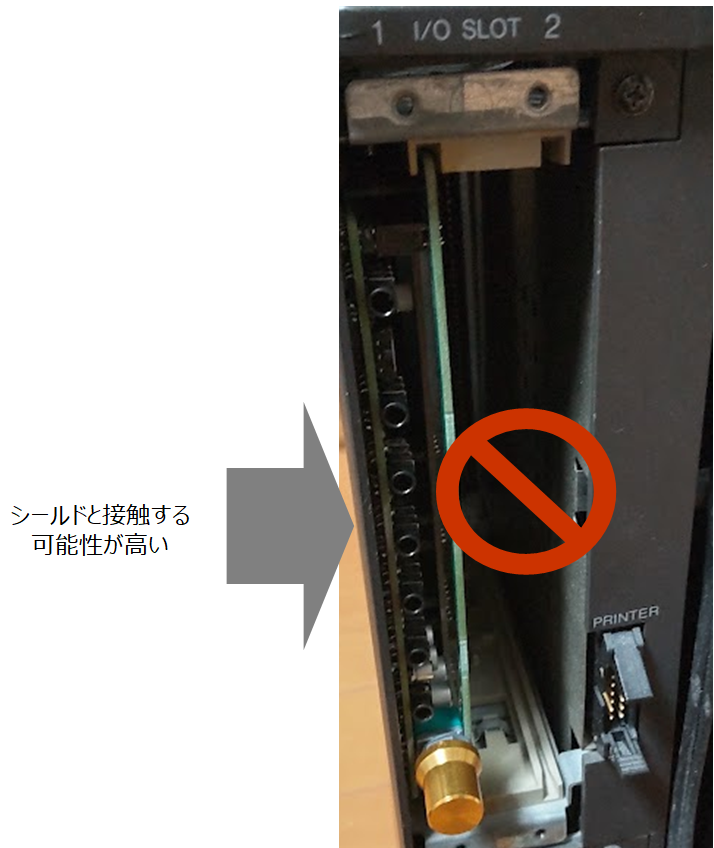
拡張スロット1(本体外側)に装着した場合は下の写真のようにシールド板と接触する可能性が高いです。 したがって何らかの理由でスロット1に装着する場合はPilederXの基板上に薄いプラスチックのシート (クリアファイル等を加工)を張り付けて絶縁してください。
この写真は絶縁していないのでダメなケースです
クリアファイルを加工して絶縁する例

拡張スロットコネクタの接触不良にご注意
X68000の実機は30年以上の時を経て拡張スロットの接触不良が多発する傾向です。 しかもPilederXはそれなりに電力を消費するので接触不良による電圧降下により 起動しない、または正常に動作しない等の不具合を生じることがあります。
拡張スロットを本体のメインボードから外して接点復活剤等でスロットを クリーニングすることで改善することがあります。
メンテナンスの一環としてスロットクリーニングをお勧めします。
セットアップ(ケーブリング) *お好みで
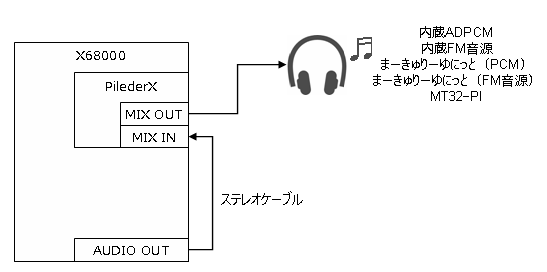
PilederXのミキサーとヘッドフォンアンプを活用するためにフロントのPHONES端子と PilederXのMIX INをステレオケーブルで接続してください。これで内蔵音源と PilederXの各音源(MT32-PI,PCM,FM音源)をミックスすることができます。
MIDIと内蔵FM音源の両方を活用したゲーム(グラディウスⅡ等)では、 MIDIと内蔵FM音源のバランス調整が必要になる筈です。バランスを調整は 前面のVOLUMEで内蔵FM音源側を調整してください。
因みにMIX INに背面のAUDIO OUTを接続しても構いませんがバランス調整ができないので、 前面PHONESとの接続をお勧めしています。
視聴環境はお好みはございますがMIX OUTに是非ヘッドフォンを使用してください。 安価なスピーカーではMT32-PIやまーきゅりーゆにっとのPCMを堪能するには不十分です。


セットアップ(稼働後)
FM音源パイルダーのリズムROM書き込み *お持ちの方のみ
ダウロードから得られるPLXRHYLD.xを使用してリズムROMファイルを設定します。 PLXRHYLD.xコマンドをX68000に何らかの手段で持ち込んでください。 PLXRHYLD.xコマンドはX68000起動直後に実行してください。
使用方法は単純でPLXRHYLD.xにリズムROMデータファイルを引数に指定してください。 リズムROMデータは8192バイトのファイルです(入手方法等は説明しません)。
A>PLXRHYLD.x ym2608_adpcm_rom.bin Rhythm data loading is complete.書き込まれたROMデータはフラッシュメモリに保存されますので一度だけ実行すれば完了です。 頒布する基板には動作確認のためサンプルデータが書き込まれていますので 特に拘りがなければ作業の必要はありません。
使用方法
PilederXを使用するための特定のソフトウェアは必要ありません。 あくまでMIDIボードでありMercury-Unit V4互換ボードとして使用することになります。
MIDIボードはMIDI対応のゲームソフトやサウンドドライバで使用できるでしょう。 対応しているソフトも多くノウハウもありますので比較的容易でしょう。
Mercury-Unit V4のPCMに対応した市販ソフトは極限られたものしかありません。 一般的にはPCM8PPを使用することになるかと思います。
Mercury-Unit V4のFM音源に対応した市販ソフトも極限られたものしかありません。 最近では復刻版のYSが対応していることを確認しています。
Mercury-Unit V4を活用する音源ドライバ等に関するノウハウはコミュニティ等に相談してください。
困ったときには
X68000が起動しないまたは不安定
PilederXにMT32-PIを取り付けた時にラズベリーパイ3A+は特に消費電力が大きいため、 X68000の起動が不安定になる可能性があります(Zero2Wでも発生するかもしれません)。
状況としては2つが考えられます。
1つめはX68000の電源が十分な電力を供給できない場合です。 この場合は電源のメンテナンスやより大容量を供給できる電源に換装するなどが必要です。
2つめは拡張スロットの接触不良によって電圧(特に5V)が低下している可能性です。 むしろこのケースの可能性が高いでしょう。 接点が汚れているとその部分が抵抗になって電圧が低下していると考えられます。 この場合は拡張スロットのA49,A50とB49,B50の端子(タワー型なら一番上)を 重点的にクリーニングしてください。 接点復活剤を塗りスロットにボードを挿入したり外したりして、 その後余分な接点復活剤をキムワイプで拭きとるなどでクリーニングする方法があります。 おそらくX68000から拡張スロット自体を外して作業する必要があるでしょう。
PilederXの動作が不安定
X68000が起動しないと同様に電源や電圧に問題がある場合はX68000が起動したとしても、 PilederXのMIDI(MT32-PI含む)やMercury-Unit V4を使用した時にバスエラーが発生するなど、 動作が不安定になる可能性があります。
原因は"X68000が起動しないまたは不安定"と同じ様に電源または拡張スロットの接触不良 の可能性がありますので先に述べた対策を行ってください。
もちろんPilederXのバグもしくは一部のエミュレーション不備の可能性もありますので、 その場合はお知らせいただけると助かります。
Xellent30とIOアドレスが重複する
これはPilederXが原因というよりもMercury-Unit V4とXellent30のIOアドレスが重複する問題です。
私はXellent30を所有しておりませんがテスターの方からXellent30はIOアドレスを 変更することができると聞いています。
Mercury-Unit V4のFM音源にノイズが発生する
Mercury-Unit V4のFM音源エミュレーションは負荷が高くラズベリーパイPicoを オーバークロックしていたとしてもYMF288×2のチャネルの多くを使用すると、 エミュレーションが間に合わずノイズが発生することが考えられます。
YMF288を1つフルに使ってもノイズが発生しないレベルにはありますので、 余程酷使しなければ問題はないと思います。
パイルダー方式ですので将来的に高性能なラズベリーパイPicoが発売されれば、 この問題は自ずと解決する可能性はあります。
MIDIが演奏されない
MIDI OUTスイッチを確認してください。 一時的にTHRUモードに変更して戻すのを忘れてしまうことが多いです(私はw)。
DACパイルダーを自作される場合
標準のDACパイルダーでもそれなりの機能を有していますが改良する余地は 大いにあると思っています。
例えば、
- オーディオ用コンデンサの採用による品質向上
- 各音源のボリューム調整などのミキサー改善
- 高級オペアンプの採用、トーンチェンジなどのアンプの改善
- MT32-PIの制御やOLEDによる状態表示の追加
- 昔のコンポやカーステで流行ったゴージャスなスペクトル表示
- ・・・
DACパイルダーの基板面積の制約はありますがユーザー様がご自身で 設計開発するのも楽しいと思います。 チャレンジされたい方は応援します。
DACパイルダーに信号線を引き出すためのコネクタのみを実装して フラットケーブル等で外部にサウンド拡張BOXのような何かを 開発するのも楽しそうですね。
良いものができたら頒布するのもいいですね。 私も買います!
参考までにジオメトリと信号線の情報を載せておきます。
基板ジオメトリ
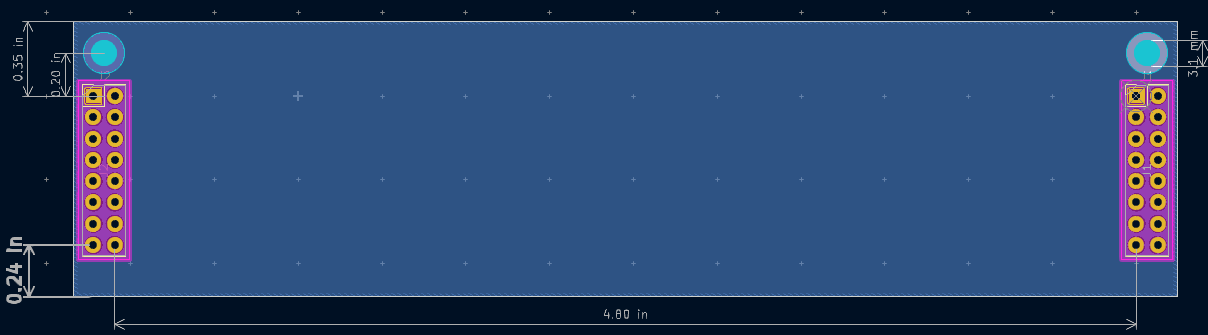
左右のコネクタは2.54ピッチのピンヘッダーです。 コネクタの内側のピン同士の間は4.8インチ丁度となります。 上下のマージンは最大で0.35インチと0.24インチ程度です。 ベースボードと固定する穴はM3ネジを想定しています。
コネクタ信号線
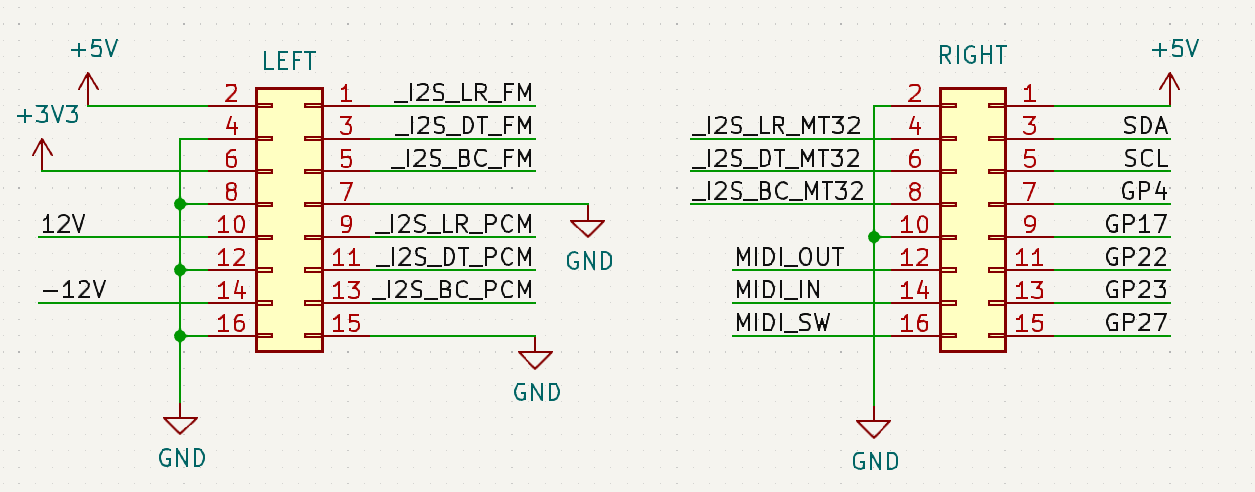
ベースボードを上から見て(ベースボードのカードエッジは上側)左右のコネクタです。
5V,3V3,12V,-12Vは各電源、GNDはグランドです。
"_I2S"で始まるピンは各パイルダーのI2S信号線となります(MT32-PI、PCM、FM音源)。 3.3V系の信号線であることに注意。
"MIDI_OUT","MIDI_IN"はMIDIパイルダーのMIDI IN,OUTへの信号線ですがGreenPAKを中継 してレベル変換及びTHRUモードを制御しています。これは5V系の信号線です。
"MIDI_SW"はMIDI THRUモードを制御します(THRUモードはGND接続、通常はオープンです)。
"SDA,SCL,GP*"はMT32-PI用のRaspberryPiのGPIOコネクタに接続されています。
PilederXの頒布(BASEのショップページにリンク)≫
BASEショップにて有償頒布予定します。
品切れが長く続くこともあると思いますが欲しいと言ってもらえる方がいる限りは 製造する考えです。
履歴
2024/8/18 Version1.02(FM音源パイルダーのみの修正)
- ビジーフラグのアサート期間の改善
レジスタ書き込み要求の平準化- レジスタ書き込み要求のスループット改善
効果音モード使用時の処理負荷低減- LFO有効時のPG,EG変動量のキャッシュ機構強化
LFOを使用した楽曲のノイズ低減2024/8/12 Version1.01(PCMパイルダーのみの修正)
- Mercury-Unit V4のPCMのパンが左右逆になる障害を修正
GreenPAKのマクロセル設定の問題でPCL信号が負論理になるように反転していませんでした。
GreenPAKのファームのエラッタ扱いとしPCMパイルダー側でパッチ対応しました。2024/8/8 Version1.00
- 初期リリース
[EOF]